已知函数 y=f(x) 的定义域为 D.若对任意区间 I⊆D,存在正整数 k,使得 Ik∩I=∅,则称函数 y=f(x) 为“回归函数”,k 为回归指数.其中 In={f(n)(x)∣x∈I},f(1)(x)=f(x),f(2)(x)=f(f(x)),…,f(n+1)(x)=f(f(n)(x)).
- 若 f(x)=x1,g(x)=x2,分别判断 f(x),g(x) 是否为回归指数为 2 的“回归函数”
- 若 f(x)=1−xx+1,D={x∣x∈R,x=0,x=1,x=−1}.求证:f(x) 为“回归函数”,并求满足条件的回归指数 k 的最小值
- f(x) 为定义域为 (0,1] 的函数,且 ⎩⎨⎧ax,0<x≤a1−ax−a,a<x≤1,其中 a∈(0,1).判断函数 f(x) 是否是“回归函数”.若是,写出证明过程;若不是,说明理由.
第三问证明
第一问、第二问里我们都将 k 理解为「存在同一正整数 k」,但实际题目在这里表述不严谨.第三问本文理解为 k 可以随 I 改变.
这里区间不知道开闭,可以发现开区间是更加严格的条件,只需证明开区间成立即可.
画出图像发现函数分为两段,因此不难想到讨论区间跨过 a、在 a 左侧、在 a 右侧的情况.
题目的“回归函数”实际上是不断迭代,把 I 作为定义域求值域,再将值域作为新的定义域求值域……迭代 n 次即得 In.如果区间完全位于 a 的左侧或右侧,可以发现由于斜率 >1,区间长度始终增长.然而,当区间跨过 a,值域会分为两段(当然,这两段可能接触形成完整的 (0,1]).
在分为两段之后,如果两段不接触,可以发现左段的左端点恰好在 0,而右段的右端点恰好在 1.由此继续迭代,两段分别会指数级增长到达 a,形成完整的 (0,1].如此一定会满足 (0,1]∩I=∅.
剩下只要排除在 a 的左右两侧反复横跳的情况即可,由于消除了 a 的干扰,可以直接使用区间长度证明.
设区间 I 的左右端点分别为 x1,x2,I′=(x1,x2),则 I′⊆I.令 In′={f(n)(x)∣x∈I′},则 In′⊆In.In′∩I′=∅⇒In∩I=∅.故以下只讨论开区间.记 I=I0.
In={f(n)(x)∣x∈I}={f(n−1)(f(x))∣x∈I}={f(n−1)(x)∣x∈I1}=…={f(x)∣x∈In−1}
假设某一步迭代满足 In=(x1,x2) 且 x1<a<x2.则:In+1=(0,1−ax2−a)∪(ax1,1].
(0,1−ax2−a)⊆In+1.断言 P(k):(0,1−ax2−a⋅ak1)⊆In+k+1,其中 ak≥1−ax2−a,k∈N.P(0) 成立.
假设 P(k) 成立,即 (0,1−ax2−a⋅ak1)⊆In+k+1.则当 ak+1≥1−ax2−a,(0,1−ax2−a⋅ak+11)⊆In+k+2,即 P(k+1) 成立.由数学归纳法知 P(k) 成立.
取最大的 k 使得 ak≥1−ax2−a,则 ak+1<1−ax2−a.由 P(k) 知 (0,1−ax2−a⋅ak1)⊆In+k+1.且由于 1−ax2−a⋅ak1>a,故有 (0,a]⊆In+k+1. In+k+2=(0,1].显然 In+k+2∩I=∅.若存在 In=(x1,x2) 且 x1<a<x2,则为“回归函数”.
若 I0=(x1,x2) 且 x1<a<x2,由上知已满足.若否,设 I0=(x1,x2) 且 x1<x2≤a(若 a≤x1<x2≤1 同理).
假设任意 n,都有 In∩{a}=∅.I0 是开区间,若 In 是开区间则 In+1 也是开区间,由数学归纳法可知 In 始终是开区间.由此对开区间 I=(x1,x2) 定义区间长度 L(I)=x2−x1.
- 若 In⊆(0,a],则 L(In+1)=ax2−ax1=aL(In)
- 若 In⊆(a,1],则 L(In+1)=1−ax2−a−1−ax1−a=1−aL(In)
设 b=max{a,1−a}∈[21,1).区间长度满足递增关系:
L(In+k)≥bL(In+k−1)≥…≥bkL(In)
取 k>logbL(In),则 L(In+k)>1,与 In+k⊆(0,1] 矛盾!故假设不成立,存在 n 使得 In∩{a}=∅,由第一部分推导可知也为“回归函数”.
综上可知 f(x) 为“回归函数”.
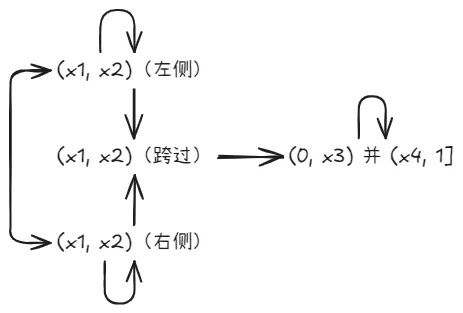
但想想觉得 In 的形状只有两种:(x1,x2) 和 (0,x3)∪(x4,1],状态转移如下图所示.那么如果定义区间长度的时候考虑这两种,就可以统一用区间长度写到底.
但如此就需要解决两段区间合并的问题.考虑用反证法排除这种情况.
同上只考虑开区间.假设 f(x) 不是“回归函数”,则存在 I⊂D,任意正整数 k,Ik∩I=∅,于是 Ik=(0,1].同样记 I=I0.
对于 A=(x1,x2) 和 B=(0,x3)∪(x4,1],x3≤x4 定义区间长度:L(A)=x2−x1,L(B)=1−x4+x3.设 b=max{a,1−a}∈[21,1).
- 若 In=(x1,x2),x1<x2≤a,则 In+1=(ax1,ax2),L(In+1)=ax2−ax1=aL(In)≥bL(In)
- 若 In=(x1,x2),a≤x1<x2,则 In+1=(1−ax1−a,1−ax2−a),L(In+1)=1−ax2−a−1−ax1−a=1−aL(In)≥bL(In)
- 若 In=(x1,x2),x1<a<x2,则 In+1=(0,1−ax2−a)∪(ax1,1],1−ax2−a≤ax1,L(In+1)=1−ax1+1−ax2−a=aa−x1+1−ax2−a≥bL(In)
- 若 (0,x3)∪(x4,1],x3≤a≤x4,则 In+1=(0,ax3)∪(1−ax4−a,1],ax3≤1−ax4−a,L(In+1)=1−1−ax4−a+ax3=ax3+1−a1−x4≥bL(In)
同样推出矛盾.我会觉得这样更漂亮.
一维动力系统
定义
定义 f(0)=id(恒等映射),f(n+1)=f∘f(n).给定点 x∈X,它的 正向轨道 是:
O+(x)={f(n)(x)∣n=0,1,2,…}
扩张映射
设 (X,d) 是一个度量空间,f:X→X 是一个映射,若存在常数 λ>1,使得对于 X 中任意足够接近的 x1,x2,
d(f(x1),f(x2))≥λ⋅d(x,y)
则称 f 为 扩张映射.若 λ<1 即为 压缩映射(类似于 Lipschitz,可参考 2026 杨浦一模 21).
在 R 上,即为:
∣f(x1)−f(x2)∣≥λ∣x1−x2∣
本题 f(x) 是分段线性扩张映射,会导致区间长度指数级增长,不断膨胀充满整个 (0,1].
不动点
若 x∗∈X 满足 f(x∗)=x∗,则称 x∗ 是 f 的 不动点.
稳定性
- 若在 x∗ 附近满足压缩映射定义则 x∗ 是 吸引不动点,附近点迭代趋于 x∗
- 若在 x∗ 附近满足扩张映射定义则 x∗ 是 排斥不动点,附近点迭代远离 x∗
这在某些数列题目中很有用:
数列 {an} 满足 an+1=2an+an2−3,且严格增.求 a1 取值范围.
画出函数 f(x)=2x+x2−3 的图像,f(x)=x 交点为 (1,1),(2,2).则 (1,1) 是吸引不动点,(2,2) 是排斥不动点.观察点在蛛网图的跳动趋势即得 a1∈(0,21)∪(2,+∞)
周期点
若存在整数 p≥1 使得 f(p)(x)=x,则称 x 为 周期点.满足该式的自小正整数 p 称为 x 的最小周期.不动点是周期为 1 的周期点.
本题第二问 f(4)(x)=x 则任意 x 均为周期点,最小周期 4.
非游荡点
点 x∈X 称为 非游荡点,若对任意邻域 U∋x,存在 n≥1 使:
f(n)(U)∩U=∅
所有非游荡点构成非游荡集 Ω(f).
本题定义的“回归函数”在动力系统中,本质上是要求定义域内的每一个点都是非游荡点.